
Symulacje inżynierskie w branży automotive są przede wszystkim kojarzone z metodą elementów skończonych, dzięki której można przedstawić takie zjawiska, jak: termika, dynamika, zmęczenie materiału, przepływ czy elektromagnetyzm. Nie stanowią one jednak całości zjawisk, które dostarcza dzisiejsza technologia. Symulacja układów optycznych to bardzo istotna ale mało znana dziedzinia symulacji wykorzystywana w procesie rozwoju produktów z branży automotive.
Elementem rozwoju branży motoryzacyjnej są różnego typu podświetlenia. Nie sposób tu nie wymienić chociażby reflektorów samochodowych, które w dzisiejszych czasach w znacznej mierze są obsługiwane za pomocą nowoczesnych systemów optycznych (rys. 1), w których źródłem światła jest dioda LED.


To tylko mała część innowacji w branży automotive. Warto przyjrzeć się bliżej takim rozwiązaniom, jak: podświetlane listwy wykończeniowe, wyświetlacze HUD na szybach pojazdów, podświetlenie ambiente czy urządzenia komunikacyjne i ładowarki typu HUB.
W stronę symulacji światła
Kierunek rozwoju analiz komputerowych wyznaczyło wykorzystanie programów inżynierskich firmy ANSYS│OPTIS do symulacji zjawisk luminancji światła. Platforma, na której są wykonywane takie symulacje, nazywa się SPEOS i jest zintegrowanym modułem w pełni kompatybilnym z programem NX firmy Siemens.
Takie zestawienie narzędzi inżynierskich znacznie podnosi wydajność w trakcie projektowania złożonych elementów mechaniczno-optycznych. Owa konfiguracja pozwala również na płynne przełączanie się pomiędzy modułami, co skraca czas pracy.
Cel projektu i przedmiot badań
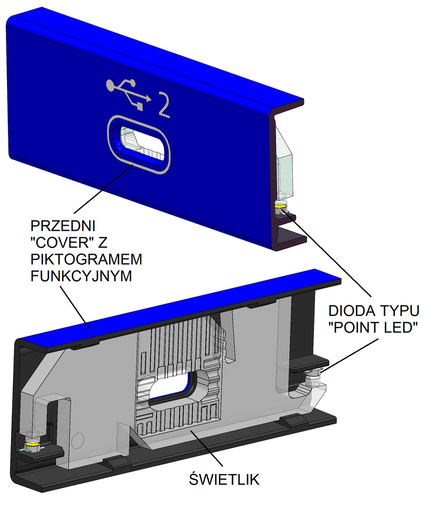
Celem projektu było wykonanie symulacji podświetlenia dla systemu optycznego ładowarki samochodowej typu HUB i optymalizacja układu optycznego, by zapewnić odpowiednią homogeniczność podświetlenia i intensywność koloru piktogramu funkcyjnego.
W artykule przedstawiono innowacyjną metodę symulacji propagacji promieni światła w geometrii 3D systemu optycznego typu dioda LED–świetlik–element zabudowy ładowarki (rys. 2).
Zatem przedmiotem badań była analiza luminancji i natężenia piktogramu funkcyjnego.
Propagacja światła – interaktywna symulacja układów optycznych
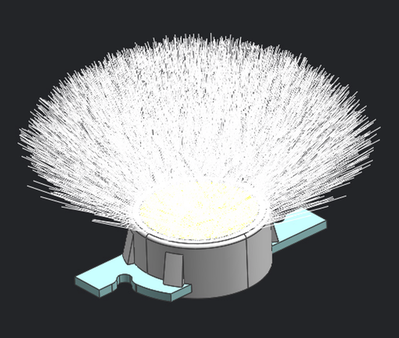
Na potrzeby symulacji użyto solvera typu interactive. Takie rozwiązanie daje dużą elastyczność podczas optymalizacji modeli świetlików lub światłowodów. Działa to na zasadzie propagacji promieni ze źródła (np. diody LED, żarówki) i obserwowania promieni w analizowanej geometrii. Można rzec, że gdy załączana jest dioda LED, wychodzące z niej promienie trafiają do przestrzeni geometrycznej i odbijają się pod różnymi kątami od napotkanych załamanych ścianek. Na skutek tego propagują światło w określonym kierunku z różną intensywnością (rys. 3).

Za pomocą interaktywnej symulacji nie można zmierzyć ilości światła, ale jest ona doskonałym narzędziem, by uzyskać wizualną informację zwrotną o propagacji promieni. Ten typ symulacji jest bardzo przydatny, by zrozumieć, w jaki sposób modyfikacja wybranej części w projekcie zmienia zachowanie optyczne układu [1].
Właściwości optyczne i charakterystyka diody LED
Nieodłącznym etapem każdej symulacji jest dobór materiałów na poszczególne części w projekcie. Inżynier musi mieć przy tym na uwadze to, że dane charakterystyki materiałowe powinny mieć zdefiniowane właściwości optyczne, takie jak refrakcja światła, absorpcja, odbicie; bardzo istotna jest również przepuszczalność światła, wyrażona w procentach według teorii Gaussa lub Lamberta.
Ważne jest też to, żeby właściwości optyczne danego materiału były przypisane do objętości i na powierzchnię danej części w projekcie. Mówiąc prościej: w projekcie jest konieczność wybrania właściwości dla SOP i VOP (surface optical properties, volume optical properties). W analizowanym przypadku dla układu optycznego typu dioda LED–świetlik–element zabudowy (przedni cover urządzenia) zostały wybrane materiały o właściwościach optycznych podanych w tabeli I.

Kolejnym krokiem na drodze do wykonania poprawnej symulacji jest dobór źródła światła i jego odpowiedniej charakterystyki. Do tego celu wykorzystano białą diodę LED, a jej spektrum długości fali według teorii Gaussa i współrzędne koloru (rys. 4 i 5) zaimplementowano w programie SPEOS jako imput file.


Charakterystyki poszczególnych materiałów, diod LED i innych źródeł światła są dostępne na stronie firmy OPTIS. Szczegóły dotyczące charakterystyki diody zostały podane w tabeli II.

Na rys. 6 przedstawiono model 3D diody LED z wizualizacją propagujących promieni światła.
Sensory w układach optycznych
Sensor optyczny można porównać do obiektywu kamery przeznaczonej do pomiaru ilości światła. Sensory w symulacji to inaczej czujniki, których zadaniem jest wyłapywanie promieni z układów optycznych badanych urządzeń.
Wyróżnia się trzy podstawowe typy sensorów. Dwa z nich dają możliwość wyświetlania wyników na powierzchniach:
- radiance (luminance) sensor – umożliwia wyświetlanie wyników w postaci luminancji w jednostkach [cd/m2],
- irradiance (illuminance) sensor – umożliwia wyświetlanie wyników w postaci natężenia w jednostkach [lux] [2].
Trzeci typ sensora – 3D irradiance sensor – może wyświetlać wyniki (mapy konturowe) na modelach 3D. W przypadku skomplikowanych systemów optycznych, z wieloma elementami, jest opcja wybrania kilku powierzchni bądź części w projekcie. Mapy konturowe są wyświetlane na powierzchniach w przestrzeni 3D.
Bardzo łatwo zauważyć, jak współpracujące elementy, np. PCB, absorbują, transmitują bądź odbijają światło wychodzące z diody LED. Sensor ten daje również możliwość zmierzenia natężenia i luminancji na wskazanych powierzchniach i – co najważniejsze – rejestruje promienie, które odbijają się we wszystkich kierunkach. Takie rozwiązanie pozwala uniknąć wielu problemów już na wstępnym etapie projektowania kompletnego urządzenia wraz z PCB i elementami elektronicznymi.
W projekcie wykorzystanodwa typy sensorów (rys. 7 i 8).
 |   |

Rys. 8. Okno ustawień sensora 3D Irradiance
Optymalizacja geometrii świetlika wspomagana solverem Direct
Symulacja układów optycznych nie miała by sensu bez optymalizacji. Solver Direct jest używany, by otrzymać mierzalne wartości luminancji z wykorzystaniem bardzo dużej liczby promieni propagujących z diody LED (rzędu kilku miliardów). Można rzec, że jest to etap zaawansowany, w którym sama analiza śledzenia promieni w geometrii jest niewystarczająca i istnieje potrzeba wyświetlenia dokładnych pomiarów luminancji.
Światło ma w rzeczywistości nieskończoną liczbę promieni. Bardzo ważne jest wykorzystanie w symulacji jak największej ich części. Dzięki temu wyniki są bardzo zbliżone do tych otrzymanych podczas testów podświetlenia. Analiza wyników wykonana w solverze Direct umożliwia wyświetlenie na powierzchni map konturowych 2D, z których bezpośrednio odczytuje się poziom natężenia i luminancji światła.
Optymalizacja świetlika odbywała na zasadzie zmian geometrycznych, które miały na celu równomiernie podświetlenie piktogramu urządzenia. Dla badanego świetlika wystarczające było wykonanie dwóch pętli optymalizacyjnych, żeby odpowiednio doświetlić piktogram funkcyjny urządzenia (rys. 9).

Rys. 9. Kolejne pętle optymalizacyjne świetlika wraz z wynikami natężenia i luminacji
Analiza wyników – symulacja versus rzeczywistość
Oczywiście symulacje powinny znaleźć odbicie w rzeczywistości podczas badań eksperymentalnych. Badania podświetlenia przeprowadza się w specjalnym zaciemnionym pomieszczeniu, a wyniki w postaci obrazu luminancji w środowisku rzeczywistym rejestruje się na wyspecjalizowanej wysokiej klasy kamerze LMK (Luminanz Messung Kamera). Dzięki zastosowaniu przetwornika RGB możliwy jest pomiar luminancji oraz barwy.
Na rys. 10 porównano wyniki luminancji i natężenia z pomiarów rzeczywistych i symulacji, uzyskane w programie SPEOS.

Rys. 10. Wizualizacja wyników pomiaru luminacji i natężenia dla pomiarów rzeczywistych i z symulacji
Symulacja układów optycznych – wnioski
Przeprowadzone optymalizacje wykazały znaczną poprawę propagacji promieni w geometrii, co w dużym stopniu wpłynęło na jednorodność podświetlenia piktogramu na przedniej zabudowie urządzenia typu HUB. Po analizach luminancji piktogramów porównano wyniki eksperymentalne i z symulacji. Badania wykazały wysoką zbieżność między nimi.
Opisane wyniki przedstawiają tylko wizualizację luminancji i natężenia bez ich mierzalnych wartości. W celu pokazania mierzalnych wartości luminancji dla rzeczywistych i symulowanych piktogramów należałoby zdefiniować jeszcze punkty pomiarowe wybranych obszarów piktogramu i odczytać ich wartości w jednostce [cd/m2] (rys. 11).

Podsumowanie
Analiza numeryczna to cenione na całym świecie narzędzie, pozwalające na skrócenie czasu pracy oraz poznanie zjawisk, których badanie eksperymentalne jest czasami niemożliwe. Możliwości, jakie dają tego typu analizy, wykorzystuje się nawet przy konstruowaniu bardzo skomplikowanych urządzeń, także wtedy, gdy brak jest określonych wymagań klienta, zwłaszcza jeżeli dotyczy to zagadnień związanych z podświetleniem.
LITERATURA
- SPEOS for NX Light & Human Vison Simulation User Guide 2016.
- OPTIS Training SPEOS for Nx – Photometry User Guide 2014.
Autorzy: Damian ŁAbusiewicz, Michał Ciesielski